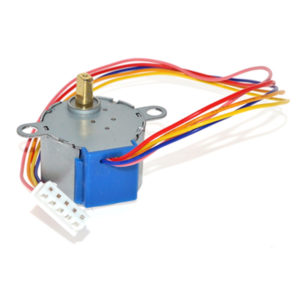
El motor paso a paso es muy habitual en los proyectos con pequeños robots y posicionadores caseros sencillos, porque aunque no es demasiado potente, ni rápido, el 28BYJ-48 es de 4 pasos (Steps), u 8 medios pasos (O half Steps) por vuelta y usa una reductora de 1 /64, por lo que necesitamos dar 8 * 64 = 512 impulsos para completar un giro completo a medios pasos. Hay 4 bobinas, si las excitamos de una en una tenemos 4 pasos x 64=256 pasos por vuelta. Pero también podemos excitar la bobina mediante medios pasos, por eso a medios pasos una vuelta son 8 * 64 = 512 impulsos, Un par de 0,34 Kg por cm, significa que con una polea de un 1cm de diámetro colocado en el eje, este pequeño motor levantaría un peso de 350 gramos contra la gravedad.
- Voltaje: 5VDC
- Tirón sin carga en la frecuencia:> 600Hz
- Fase: 4
- Frecuencia de extracción sin carga:> 1000Hz
- Ratio de reducción: 1/64
- Par de tracción:> 34.3mN.m (120Hz)
- Ángulo de paso: 5.625 ° / 64
- Par de auto-posicionamiento:> 34.3mN.m
- DCR: 200Ω ± 7% (25 ° c)
- Temperatura: <40K (120Hz)
- Resistencia de aislamiento:> 10MΩ (500V)
- Ruido: <40dB (120Hz, sin carga, 10cm)
- Rigidez dieléctrica: 600VAC / 1mA / 1s
- Peso: 32g
- Clase de aislamiento: A
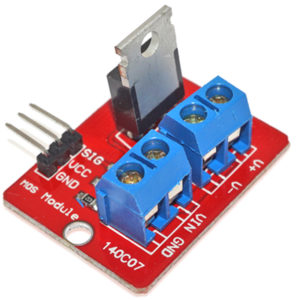
- Puede ser accionado por un chip ULN2003 o L298 común